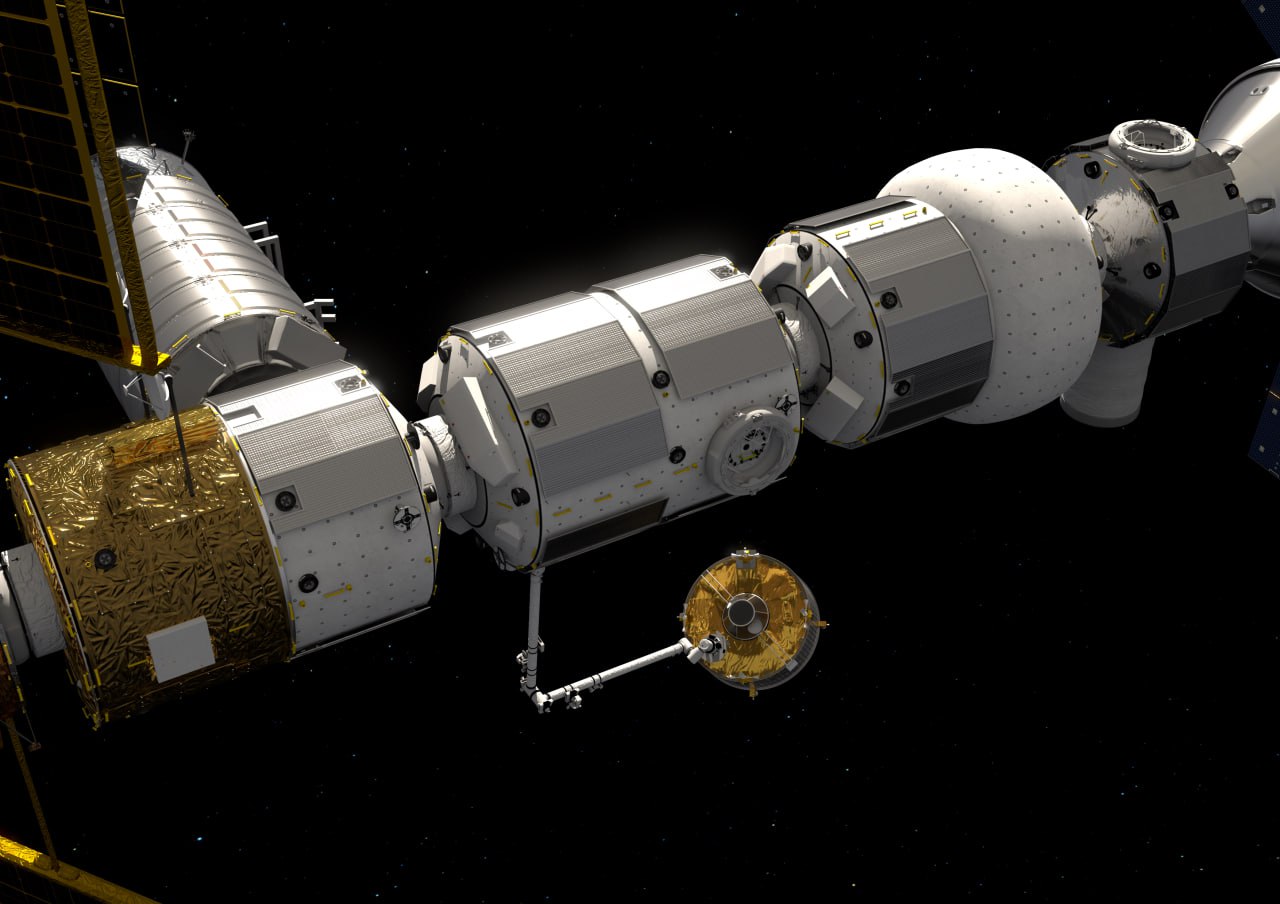

On-orbit manipulation plays an essential role in current and future space debris removal, on-orbit servicing, assembly, rescue, repair or refueling missions. On-going active debris removal missions, such as the Astroscale Elsa-D and Clearspace-1, are starting to demonstrate technologies needed to approach and manipulate debris. Vehicles such as the Northrop Grumman's Mission Extension Vehicle-1 (MEV-1) have also shown the feasibility of commercial on-orbit servicing and life extension. In the near future, robotic servicing spacecraft may perform a wider range of operations which will involve even more complex tasks with higher levels of autonomy, reliability, efficiency, and safety. Under development programs, such as the DARPA's Robotic Servicing of Geosynchronous Satellites (RSGS), NASA's On-orbit Servicing, Assembly and Manufacturing – 1 (OSAM-1), will rely on several robotic arms and autonomous systems for performing complex operations, such as in-orbit repairing, assemble and manufacturing of satellites.
In this flourishing context, the development of efficient and reliable on-orbit manipulation techniques represents one of the challenging aspects and the key enabler for the success of such missions. Robotic operations performed in very close proximity represent one of the most dangerous phases of the overall mission, where two spacecraft (namely, the servicing spacecraft and the target spacecraft) might collide and be damaged in case of errors or unforeseen occurrences. Such operations also impose very strict requirements in terms of accuracy of the robotic maneuvers, which need to be performed in free-floating conditions: with the attitude of the servicing spacecraft moving as a consequence of the motion of the robotic arms. In addition, the contact dynamics in free-floating condition and the eventual manipulation of components of the target satellite might also represent a challenge for the robotic operations, especially when the target satellite is uncontrolled non-cooperative conditions. Torque and force sensors located on end effectors of the robotic manipulators can be generally used to sense and evaluate the contacts among the bodies and eventually compensate for eventual errors in the positions of specific tools and interfaces located at the manipulator end to perform a given task such as a cutting or unscrewing tool. HR Space robotics section provides solutions for the path planning and control systems for on-orbit robots that consider both the kinematics and dynamics of these robots. Such approaches consider the robot's free-floating, frictionless conditions and specific orbital perturbations in space.
The technology readiness of space qualified cameras, as well as of the onboard computers, is mature enough that the techniques developed for the visual servoing of ground-based robots can be easily implemented onboard. An example of automated rendezvous is the Automated Transfer Vehicle, where the relative position and attitude of the chasing vehicle with respect to the International Space Station (ISS) is reconstructed by identifying the visual features of a specific target attached to the ISS. HR Space robotics section has developed direct visual servoing approaches to solve problems involving robot manipulators [1][2], spacecraft rendezvous [3][4], guidance of multiple spacecraft [5], on-orbit manipulation [6][7][8], and redundant manipulators in space [9].
Concurrent image-based visual servoing with adaptive zooming for non-cooperative rendezvous maneuvers
Human Robotics Group - University of Alicante
Contact us
-
Human Robotics
UA Polytechnic School 3
Physics, Systems Engineering and Signal Theory Department
University of Alicante
Ctra San Vicente del Raspeig s/n
San vicente del Raspeig
03690 Alicante, Spain. -
(+34) 965 903 400 Ext. 1094
-
huro@ua.es
-
Week Days : 09:00 – 18:00
Saturday, Sunday : Holiday