
DEVELOPMENT AND MONITORING OF SAFE HUMAN-MACHINE INTERACTION SYSTEMS FOR REHABILITATION ROBOTIC TASKS
- Reference: CIGE/2022/10
- Principal investigator: Vicente Morell
- Research Centers: University of Alicante
- Duration: October 1st, 2022 – December 31th, 2023
- Financial Entity: Regional Ministry of Innovation, Universities, Science and Digital Society - GV
- Funding: 10.000 €
The objectives of the project are the following:
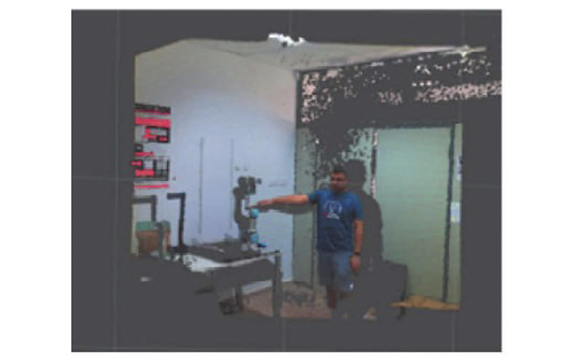
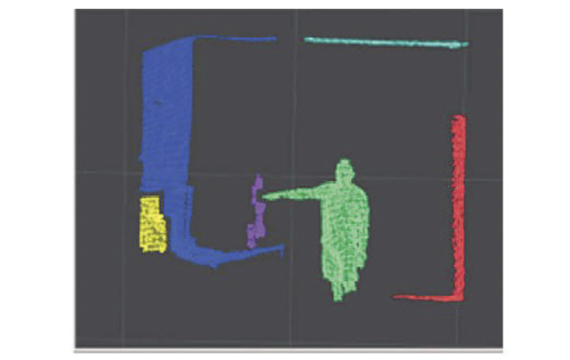
- To design and implementation of the monitoring system with 3D cameras.
- To evaluate methods for robust estimation of the pose of the users within the monitored room.
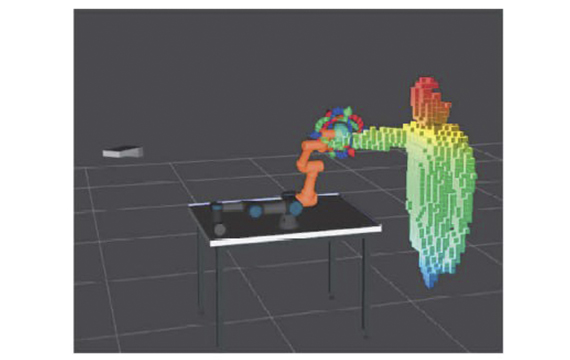
- To evaluate safety methods between robotic elements and users with special attention to rehabilitation tasks.
- To generate tools to assess the accuracy of external robotic systems.
Some facts in Numbers
2
JCR Journals
1
International Conferences
0
National Conferences
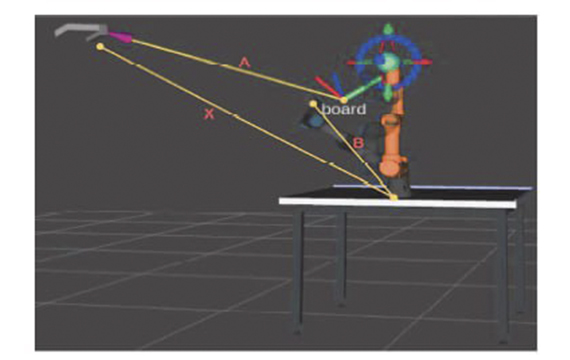
This project aims to design a safe rehabilitation system supported by collaborative robots. This requires reliable monitoring of the environment and patients to enable the integrated system to guarantee the safety of patients while the rehabilitation process is being carried out under the guidance of a collaborative robotic arm. The future goal is to achieve a rehabilitation system that allows us to objectively measure the progress of patients in the rehabilitation process with the least possible intervention by doctors. The project therefore integrates computer vision tasks for reconstruction and monitoring of the environment, intelligent control for the safe movements of the robot and the design and implementation of a procedure (exercises and metrics) for rehabilitation assistance.
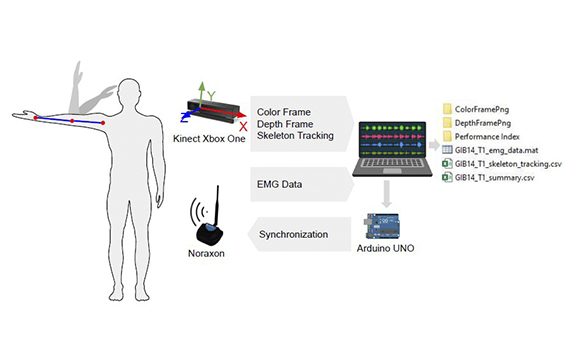
KIMHu: A Kinematic, Imaging and electroMyography dataset for Human muscular manipulability index prediction
Human Robotics Group - University of Alicante
Design and Control
of Robots
Advanced mechanical design of robotic devices and kinematic - dynamic control performance
Contact us
-
Human Robotics
UA Polytechnic School 3
Physics, Systems Engineering and Signal Theory Department
University of Alicante
Ctra San Vicente del Raspeig s/n
San vicente del Raspeig
03690 Alicante, Spain. -
(+34) 965 903 400 Ext. 1094
-
huro@ua.es
-
Week Days : 09:00 – 18:00
Saturday, Sunday : Holiday