
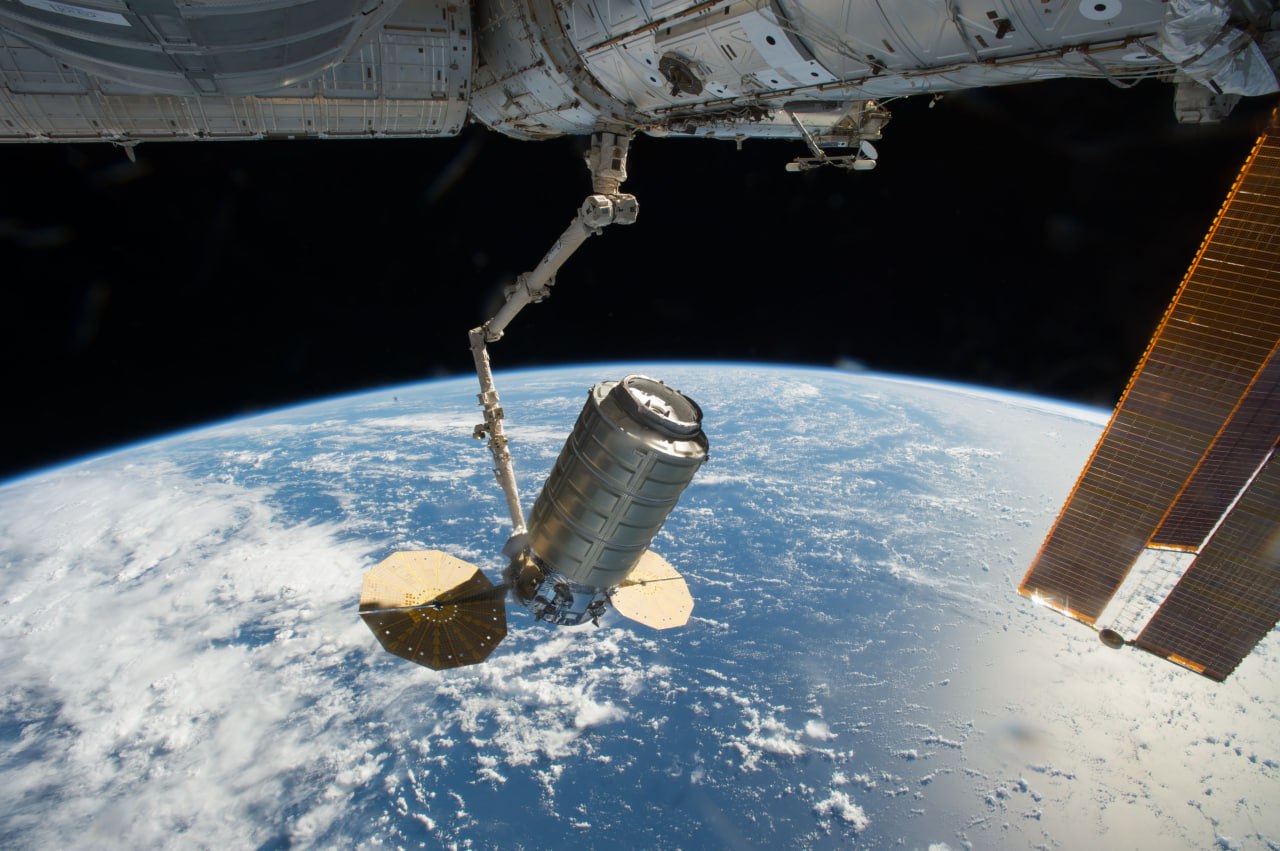
On-orbit servicing provides an opportunity to extend mission life of damaged or fuel-depleted satellites as well as repair and correct any issues that need to be addressed physically. For example, refueling a satellite can prove to be much more cost effective, rather than terminating its use and launching an entirely new satellite. The ability to refuel a depleted satellite would not only allow it to stay active for longer but would reduce the amount of new debris created by abandoning it. On orbit assembly will provide flexibility to many future space mission designs. From building structures for human habitation on Mars or the Lunar surface, to building telescopes and large space structures, the application of robots will play a vital role in accomplishing the upcoming milestones. The assembly of these infrastructures in space will involve intricate tasks with high requirements of reliability, efficiency, and safety. These tasks will require the deployment of autonomous robots, particularly for tasks characterized by repetitive, structured, and standardized operations.
HR Space robotics section provides solutions to major challenges in on orbit servicing, assembly and manufacturing including mobility, precise manipulation, localization/mapping, and adaptability to uncertainties in the environment. Advanced control approaches and AI based techniques have been proposed in our works within this field. We should mention nonlinear optimal controllers for autonomous reentry space vehicles [1], and advanced controllers for the guidance of manipulators in robotic servicing [2][3][4][5]. These approaches include visual servoing [2][3][6], force control [4] and AI based approaches [5] for the guidance of spacecraft and space manipulators in servicing and assembly tasks in space. Large ground-based facilities built in inaccessible locales could also benefit greatly from in-situ robotics for inspection and servicing, and likely would necessitate a multi-robot scalable solution.
Concurrent image-based visual servoing with adaptive zooming for non-cooperative rendezvous maneuvers
Human Robotics Group - University of Alicante
Contact us
-
Human Robotics
UA Polytechnic School 3
Physics, Systems Engineering and Signal Theory Department
University of Alicante
Ctra San Vicente del Raspeig s/n
San vicente del Raspeig
03690 Alicante, Spain. -
(+34) 965 903 400 Ext. 1094
-
huro@ua.es
-
Week Days : 09:00 – 18:00
Saturday, Sunday : Holiday