GAmified Robot-assisted MOtor Rehabilitation based on neuromechanical assessment (GARMOR)
- Reference: PID2022-139105OB-I00
- Principal Investigators: Carlos Jara, Andrés Úbeda
- Research Center: University of Alicante
- Duration: October 1st, 2023 – September 30th, 2026
- Financial Entity: AEI, Spanish Ministry of Science, Innovation and Universities
- Funding: 167.125 €
The specific objectives of GARMOR are listed next:
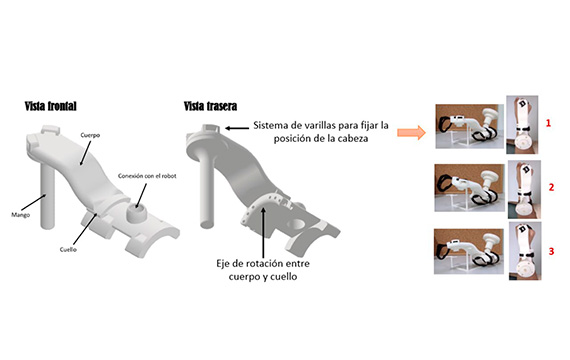
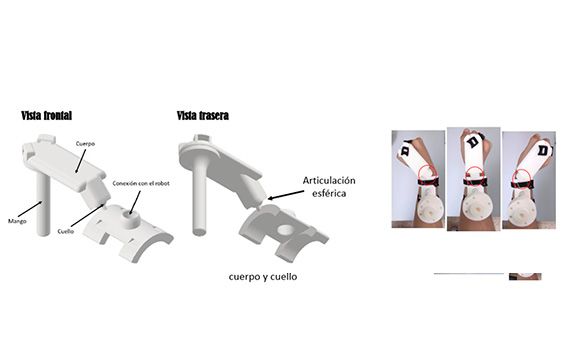
- To explore a more ergonomic and flexible robot-assisted rehabilitation based on end-effector approaches.
- To provide a more reliable and quantitative evaluation of motor recovery compared to conventional clinical metrics.
- To effectively introduce gamified clinical intervention in a personalized and easy-to-learn rehabilitation activity.
- To have a deeper understanding or upper limb motor control both in healthy and stroke survivors and provide large open-source standardized neuromechanical datasets for the scientific community.
The sudden loss of upper-limb motor function is a clinical condition that is generally caused by brain damage, trauma at the spinal level or other neuromuscular diseases. Functional recovery is variable and specific to each patient and depends on the seriousness of the injury and the type of pathology. In the case of Acquired Brain Injury (ABI) patients, most of them suffering from a stroke, recovery is crucial during the subacute phase, which happens between one and six months immediately after the incident. During the last few years, conventional rehabilitation has seen an important development in complementary tools to increase the effectiveness of the therapy. One of the main ways of providing a faster and better recovery is the use of robotic devices. In the case of upper limb rehabilitation, end effector robots have provided a way to increase the intensity and repeatability of rehabilitation protocols. However, the use of these systems has not been yet standardized in the clinical setting due to the variability in the protocols and technologies, and the absence of more reliable and quantitative motor function assessment.
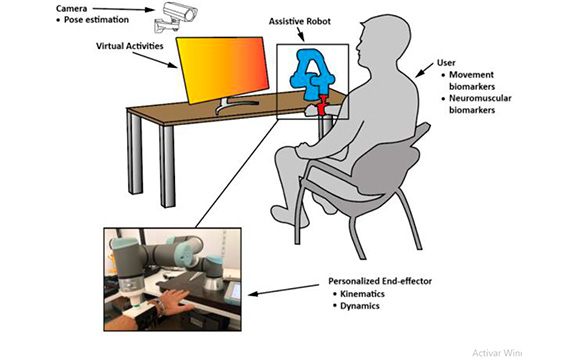
The main goal of GARMOR is the development of a gamified robot-assisted rehabilitation platform to deliver a personalized and more effective rehabilitation of the upper limb in stroke individuals. To that end, this project will provide a complete upper limb rehabilitation robotic setup ready to use in clinical settings by introducing quantitative neuromechanical assessment using advanced electromyographic and movement estimation techniques and proposing novel approaches to end-effector robot-assisted rehabilitation. Additionally, the setup will be combined with engaging gamified virtual activities to track the rehabilitation process. This project covers covering three critical needs of current rehabilitation centers: 1) the improvement of rehabilitation resources leading to an increase in the number of inpatients and outpatients; 2) the modernization of rehabilitation methods by providing flexible, easy-to-use and relatively inexpensive technologies; and 3) the subsequent savings in economic and social costs by reducing the burden of motor pathologies in current society.
Some facts in Numbers
0
JCR Journals
0
International Conferences
0
National Conferences
Human Robotics Group - University of Alicante
Design and Control
of Robots
Advanced mechanical design of robotic devices and kinematic - dynamic control performance
Contact us
-
Human Robotics
UA Polytechnic School 3
Physics, Systems Engineering and Signal Theory Department
University of Alicante
Ctra San Vicente del Raspeig s/n
San vicente del Raspeig
03690 Alicante, Spain. -
(+34) 965 903 400 Ext. 1094
-
huro@ua.es
-
Week Days : 09:00 – 18:00
Saturday, Sunday : Holiday