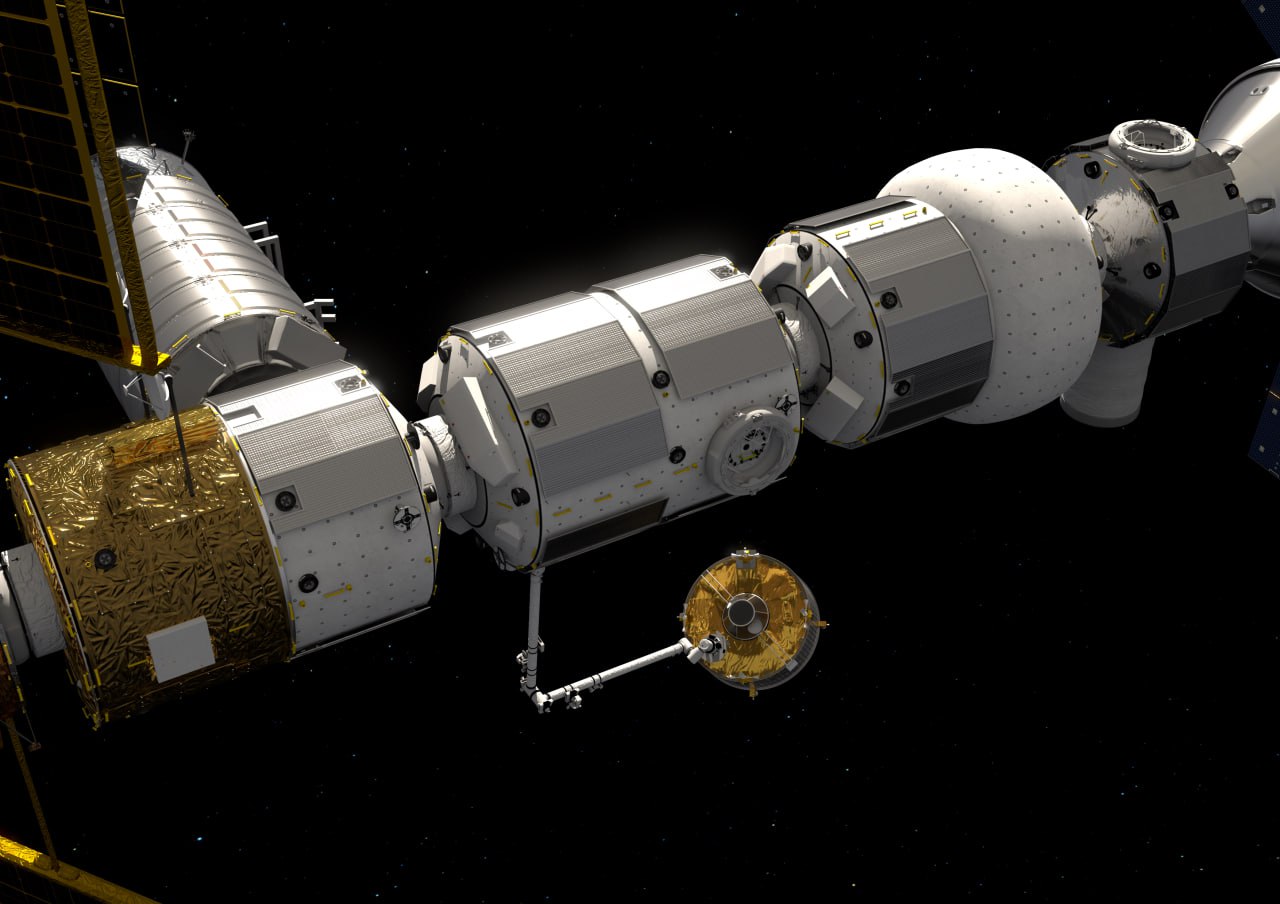

The utilization of robotic systems in space is currently enabling new mission concepts and applications for both in-orbit operations, as well as off-world exploration and exploitation. Space robots are foreseen as essential for numerous on-orbit operations (e.g. servicing, assembly and manufacturing) and their utilization in ongoing and under development missions seems already consolidated or, in any case, achievable in a relatively short time.
However, the increase in the technology readiness level of such robotic technology and the enhancement of the space-qualified computational, sensory and actuation capabilities allows for the proposal of new and more challenging missions utilizing multiple robotic and autonomous systems. Missions that involve the construction of large structures (e.g., for the collection and generation of space-based solar power, for ultra-large telecommunication antennas, or for deep space observation via telescopes with sizes that go beyond the James Webb Space Telescope) will definitively use numerous and specialized robotic systems interacting with each other to build, assemble and maintain such large structures. For example, new active debris removal missions and/or asteroid redirection missions might involve swarms of small fractionated spacecraft approaching, docking, and eventually pushing the target towards favorable orbits. On the other hand, planetary exploration would benefit from the actual cross-platform interaction, e.g., with drones, hopping systems and rovers coordinating each other for mapping, analyzing, and exploring Mars or other celestial bodies. Finally, distributed and cooperative robots would enable new in-situ resource utilization concepts and the construction of infrastructures for an eventual pre-human exploration and/or colonization. In the last few years, HR Space robotics section has provided solutions to multi-robot approaches [1], by defining new control, guidance and navigation approaches. These approaches include visual servoing systems and optimal control approaches for spacecraft formation flying [2].
Human Robotics Group - University of Alicante
Contact us
-
Human Robotics
UA Polytechnic School 3
Physics, Systems Engineering and Signal Theory Department
University of Alicante
Ctra San Vicente del Raspeig s/n
San vicente del Raspeig
03690 Alicante, Spain. -
(+34) 965 903 400 Ext. 1094
-
huro@ua.es
-
Week Days : 09:00 – 18:00
Saturday, Sunday : Holiday