Open source control and simulation platform for on-orbit servicing robotics scenarios
- Reference: CIAICO/2022/077
- Principal Investigators: Jorge Pomares, Cristina Cachero
- Research Center: University of Alicante
- Duration: October 1st, 2023 – September 30th, 2025
- Financial Entity: Regional Ministry of Innovation, Universities, Science and Digital Society - GV
- Funding: 90.000 €
The research to be carried out in the field of control systems for robots in orbit can be specified as follows:
- Proposal of new specific control systems for robotic manipulators that take into account the dynamics of the manipulators in space and the coupling effects between the robot and the satellite that supports them.
- Research and development of control systems for robots in orbit that are able to compensate for disturbances such as orbital gradient to which the robot may be subjected depending on the orbit.
- Research into sensory control of robots in orbit so that robots can be guided using sensory information during their in-orbit service task.
The research and proposal of an open source simulation tool to evaluate the behaviour of robots in orbit can be specified in the following specifics objectives:
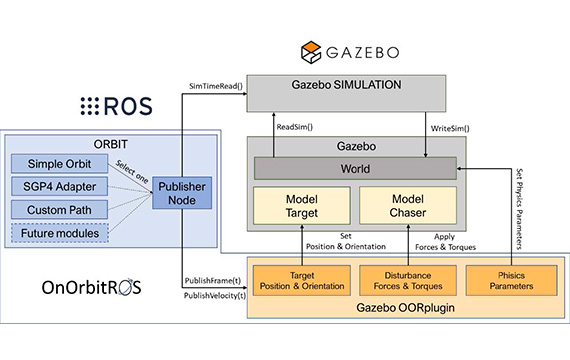
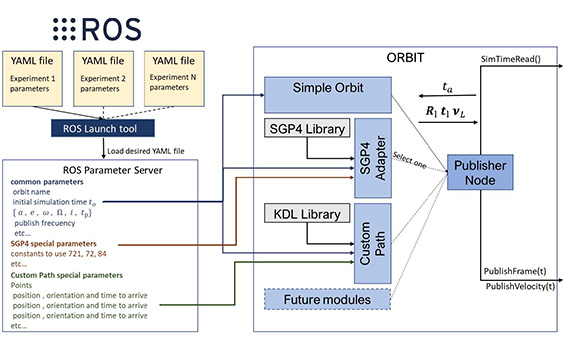
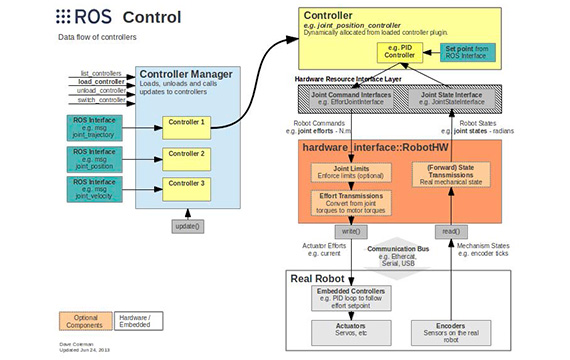
- Research and proposal of an architecture based on ROS/Gazebo and DTs for its application to robots in orbit.- Evaluation and proposal of a simulation system based on Gazebo for the simulation of robotic systems in orbit.
- Evaluation and verification of the simulation system using real data from robots in orbit.
- Development of simulations with case studies and real missions.
Future space missions, including those in development, will require the use of robots in tasks such as space debris removal and servicing tasks such as on-orbit assembly or manufacturing. The development and testing of these systems often requires an iterative approach which, together with the technical difficulties of reproducing conditions in space using existing resources on Earth and the high costs associated with these tests, discourages the use of hardware-based approaches in the early design phase of these missions. Simulation tools such as those offered by ROS/Gazebo are currently a very common approach for the development, simulation and implementation of control and guidance algorithms for typical terrestrial robots, but even today this option is not accepted as valid by the space technology research community. One of the reasons is that such development environments do not allow for a complete and realistic simulation of conditions in space such as microgravity, orbital gradient and frictionlessness.
There are numerous studies in the field of space robotics that use ad-hoc solutions for the simulation and validation of guidance and control systems, but these are non-standard solutions. They do not use open source and sometimes unverified tools are used, which complicate rather than promote the development and realisation of versatile robotic algorithms and systems for space robotics.
Taking into account all these aspects that define space robotics, a research team with expertise in space robotic systems, robot control and software development has been assembled in this project with the aim of developing new control systems for in-orbit robots and an open source tool for the simulation of in-orbit robotic systems. It is proposed to develop a framework based on ROS, an open source meta-operating system developed specifically for the development of robotics applications. Usually, ROS is combined with Gazebo as a tool to simulate robots in this type of environment. However, these tools have to be adapted to include and reproduce the main conditions that robots and manipulators may experience in an in-orbit service scenario. This solution has to allow the simulation of complex robotic systems and, at the same time, take advantage of the large number of software packages already developed in ROS for control, vision, teleoperation and modelling. In this way, it would be possible to simulate robots performing in-orbit servicing tasks without the need for ad-hoc code for the simulation and using a widely validated tool.
Some facts in Numbers
0
JCR Journals
2
International Conferences
0
National Conferences
Human Robotics Group - University of Alicante
Design and Control
of Robots
Advanced mechanical design of robotic devices and kinematic - dynamic control performance
Contact us
-
Human Robotics
UA Polytechnic School 3
Physics, Systems Engineering and Signal Theory Department
University of Alicante
Ctra San Vicente del Raspeig s/n
San vicente del Raspeig
03690 Alicante, Spain. -
(+34) 965 903 400 Ext. 1094
-
huro@ua.es
-
Week Days : 09:00 – 18:00
Saturday, Sunday : Holiday