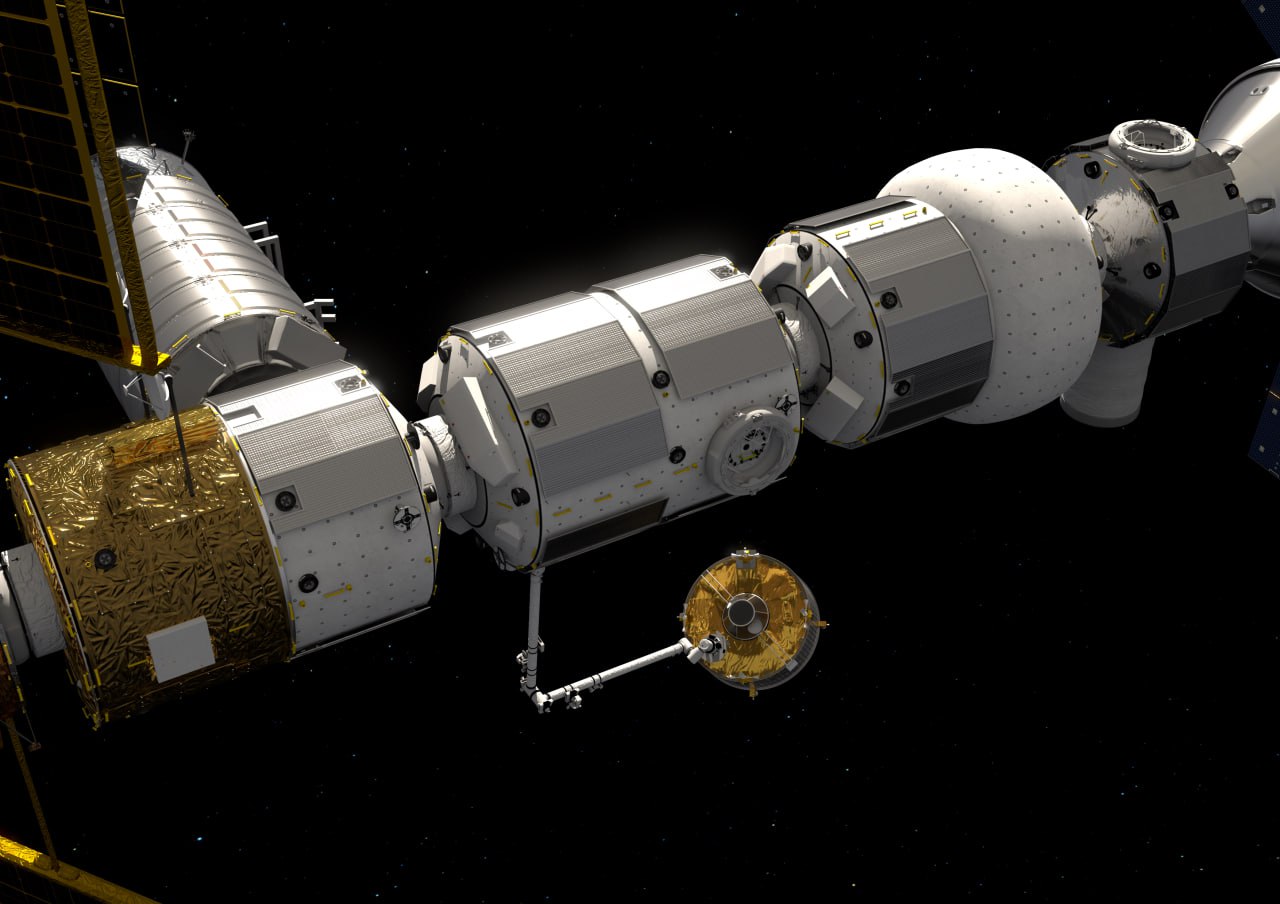

With an ever-increasing number of satellite operations in Earth’s orbit, the demand for space debris removal and on-orbit servicing has become a necessity. Space debris removal and on-orbit servicing are essential to the continuation of safe space exploration. Within orbital robotics, the proposal of new advanced control approaches and AI-based techniques are required for the guidance and control of space robots in space. Τasks such as inspecting, refueling, upgrading, repairing, or rescuing satellites, removing of orbital debris, and construction and maintenance of large orbital assets and infrastructures are important for maintenance of space infrastructure on orbit. In addition, the application of advanced control approaches and AI-based algorithms for the navigation and path planning of deep space spacecraft devoted to the exploration of harsh environments is fundamental to enable the implementation and development of reliable and safe autonomous systems.
Artificial intelligence addresses the main issues related to the Guidance, Navigation and Control through alternative algorithm schemes that are based on neural networks. Supervised and unsupervised Machine Learning algorithms adopt a preliminary neural network training with and without pairs of labeled input/output, respectively. These techniques are well-suited for space and robotic applications whose dynamical model is poorly known. Reinforcement learning is an interactive machine learning paradigm that learns a control policy end eventually learns a system transition function (i.e., a dynamics model), to guide its definition. A preliminary knowledge of the dynamical model that predicts the evolution of the true robotic system is not always necessary, but can be helpful to generate low-cost control policies, enabling accurate convergence of the algorithm. Decision making and operations of robotic assets are also cast as multi-class classification problems.
HR Space robotics section proposes the application of AI techniques for the Guidance Navigation and Control system of spacecraft and space robotics. Advanced control approaches and AI-based techniques have been proposed in our works within this field [1][2][3]. We should mention nonlinear optimal controllers for autonomous reentry space vehicles, and advanced controllers for the guidance of manipulators in robotic servicing. These approaches include visual servoing, force control and AI based approaches for the guidance of spacecraft and space manipulators in servicing and assembly tasks in space.
Human Robotics Group - University of Alicante
Contact us
-
Human Robotics
UA Polytechnic School 3
Physics, Systems Engineering and Signal Theory Department
University of Alicante
Ctra San Vicente del Raspeig s/n
San vicente del Raspeig
03690 Alicante, Spain. -
(+34) 965 903 400 Ext. 1094
-
huro@ua.es
-
Week Days : 09:00 – 18:00
Saturday, Sunday : Holiday