INTELLIGENT ROBOTIC MANIPULATION FOR HUMAN ASSISTANCE TAKS
- Reference: GRE15-05
- Principal investigator: Carlos A. Jara Bravo
- Research Centers: University of Alicante
- Duration: September 1st, 2016 – August 31th, 2018
- Financial Entity: University of Alicante
- Funding: 12.955 €
The objectives achieved by the project were the following:
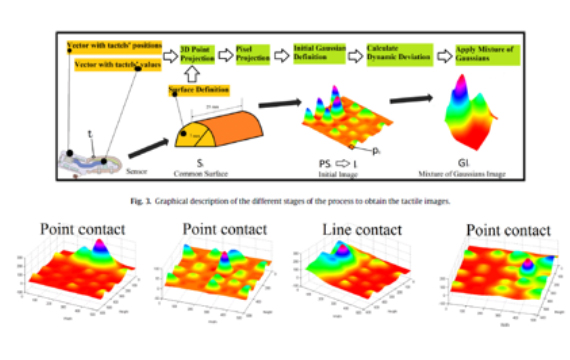
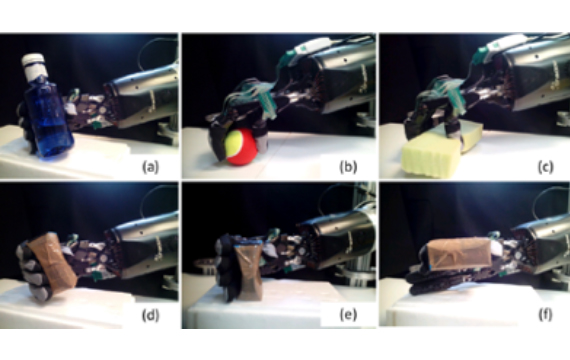
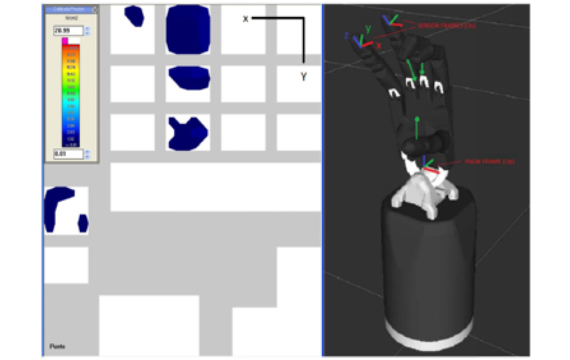
- Research in techniques for intelligent manipulation of unknown objects using a multisensory system (vision, tactile and force).
- Research in robot-human collaboration techniques for the performance of a coordinate task.
Some facts in Numbers
3
JCR Journals
3
International Conferences
2
National Conferences
1
PhD Thesis
Currently, robotics is present in assistance applications to alleviate the needs arising with the aim of improving the quality of life of people with mobility problems. It is within this scope that the present project is framed, with the purpose of providing an intelligent assistance in manipulation tasks to people who present some type of motor disability, as assistance in daily and / or daily environments and tasks. The control system of the robotic system must be able to adapt to dynamic, changing, unstructured environments and in interaction with humans. For this reason, the intelligent manipulation system of the robotic system must process information from different sensory systems (vision, force and tactile) that allow to integrate in the control system the perceptive capacity necessary to manipulate unknown objects of the environment and with the possibility of collaborate with the human in basic tasks of high level.
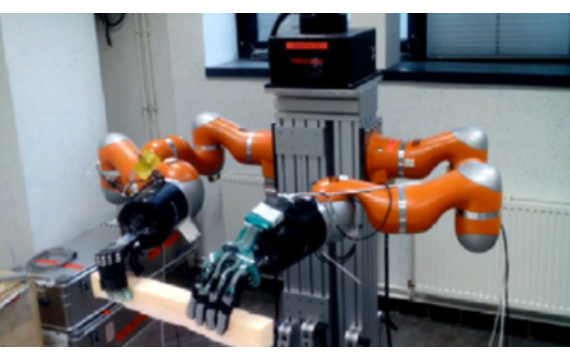
In order to provide intelligent manipulation to people with some type of motor disability in their daily and daily tasks, two robotic hands were located on two available anthropomorphic robot arms. The robot-human collaboration in the same environment to provide a service or assistance is going to be an important point in the future of robotics. This field demands sensitive robotic systems with high handling functionalities. This project aims to investigate the dual manipulation (with two robotic hands) or in collaboration with a human to solve a task. For this reason, the manipulation system will be complemented with sensorial systems based on vision, force and tactile that allow to integrate in the control system the perceptive capacity necessary to manipulate unknown objects.
Human Robotics Group - University of Alicante
Design and Control
of Robots
Advanced mechanical design of robotic devices and kinematic - dynamic control performance
Contact us
-
Human Robotics
UA Polytechnic School 3
Physics, Systems Engineering and Signal Theory Department
University of Alicante
Ctra San Vicente del Raspeig s/n
San vicente del Raspeig
03690 Alicante, Spain. -
(+34) 965 903 400 Ext. 1094
-
huro@ua.es
-
Week Days : 09:00 – 18:00
Saturday, Sunday : Holiday