


Research lines of the HURO Space Robotics Section
Human Robotics Group - University of Alicante
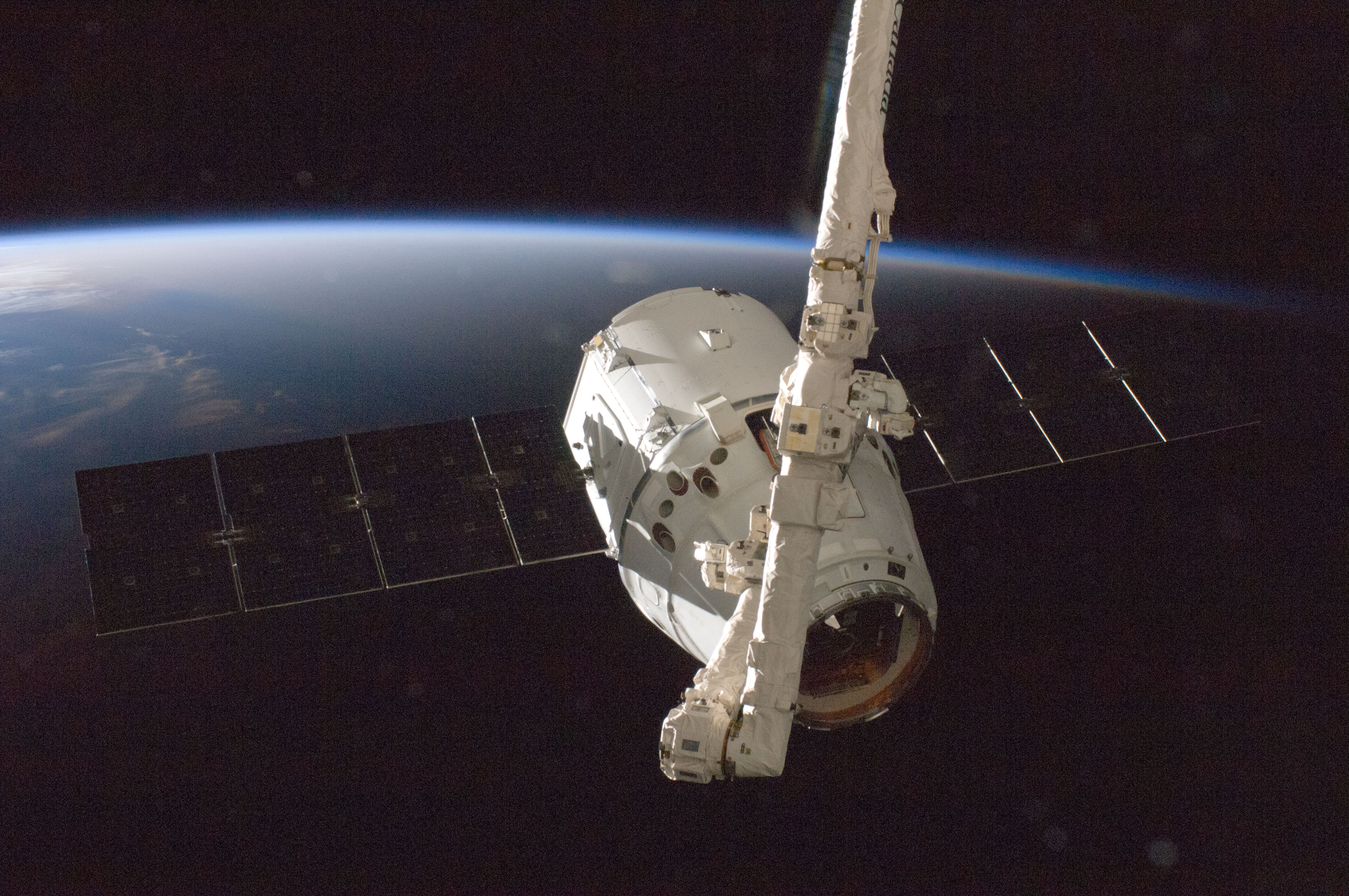
HURO research lines are focused in the benefit of humans and environmental impact, developing solutions for human-robot interaction and services, for helping disabled people and for spacecraft control applications.
Contact us
-
Human Robotics
UA Polytechnic School 3
Physics, Systems Engineering and Signal Theory Department
University of Alicante
Ctra San Vicente del Raspeig s/n
San vicente del Raspeig
03690 Alicante, Spain. -
(+34) 965 903 400 Ext. 1094
-
huro@ua.es
-
Week Days : 09:00 – 18:00
Saturday, Sunday : Holiday