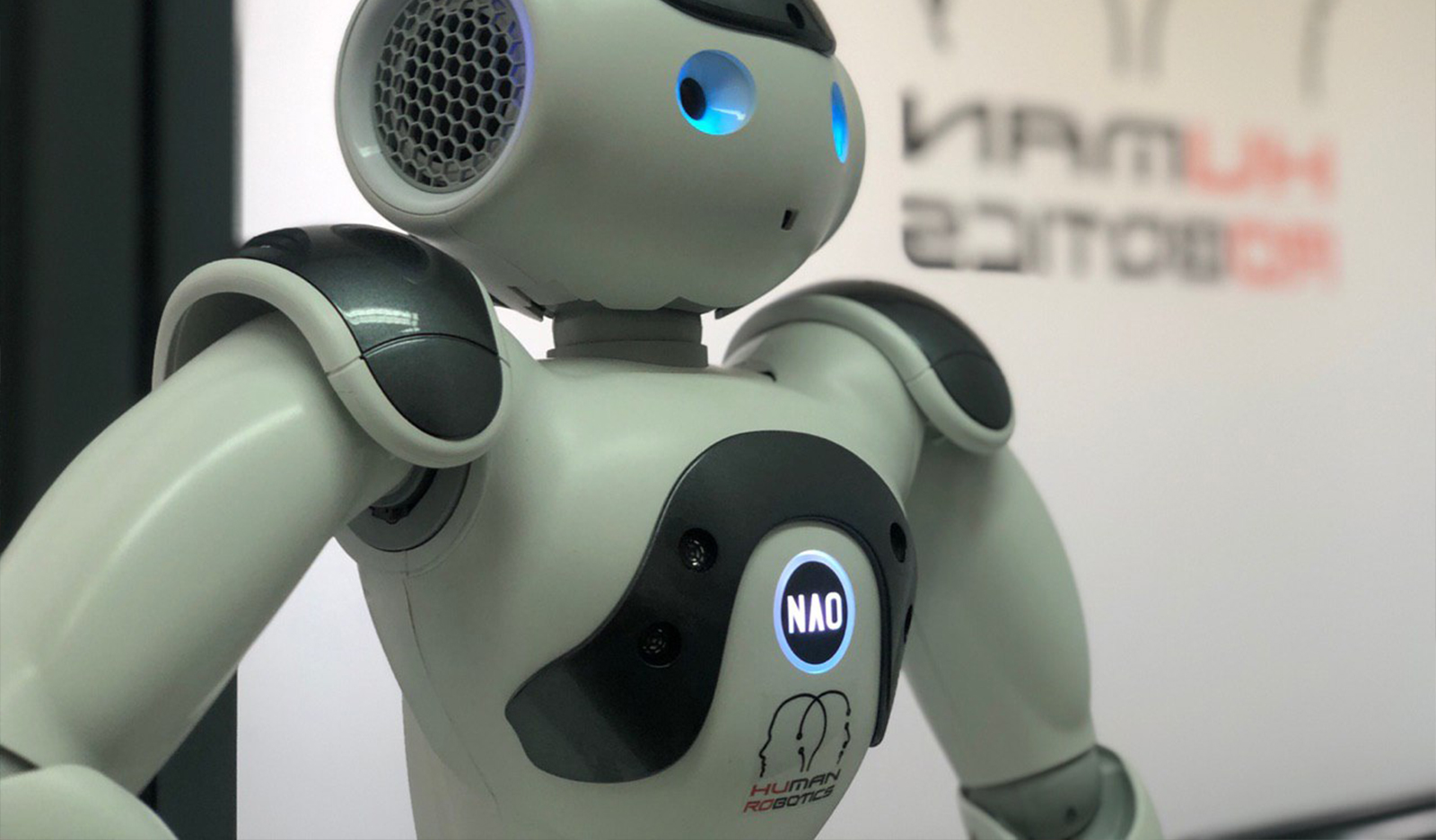
Humanoid robots are designed to simulate the shape and movements of human beings, as well as its appearance and sensorization. Humanoid robots are currently robotic platforms in which artificial intelligence algorithms can be developed for different purposes, such as interaction in human environments and social behavior Additionally, this kind of platform can be employed for different research and experimental purposes such as bipedal locomotion control, movement of the joints and extremities, and precise handling of unknown objects. Therefore, humanoid robots suppose a platform of experimentation very adequate for the development and test of different algorithms of control and artificial intelligence. In addition, sensor information is necessary to obtain data from the environment (suchs as visual or range information) or more sophisticated as tactile or force. The components of the HUman RObotics research group are innovating within this kind or robots for the development of new controllers for both functional and experimental purposes. This research is currently in development more specifically in the following aspects:
- Design and control of humanoid robots.
- Simulation and control of ROS based components of humanoid robots
- Humanoid robots in assistive and social environments.
- Artificial intelligence in humanoid robots.
- Deep-learning.
Human Robotics Group - University of Alicante
Design and Control
of Robots
Advanced mechanical design of robotic devices and kinematic - dynamic control performance
Contact us
-
Human Robotics
UA Polytechnic School 3
Physics, Systems Engineering and Signal Theory Department
University of Alicante
Ctra San Vicente del Raspeig s/n
San vicente del Raspeig
03690 Alicante, Spain. -
(+34) 965 903 400 Ext. 1094
-
huro@ua.es
-
Week Days : 09:00 – 18:00
Saturday, Sunday : Holiday