EMBEDDED VISUAL SERVOING FOR ROBOT MANIPULATORS USING FPGA RECONFIGURABLE HARDWARE
- Reference: GRE12-17
- Principal investigator: Gabriel J. Garcia
- Research Centers: University of Alicante
- Duration: September 1st, 2013 – August 31th, 2015
- Financial Entity: University of Alicante
- Funding: 3.000 €
The objectives achieved by the project were the following:
- Investigate in generic control systems embedded in FPGA.
- Develop a direct visual control scheme over FPGA.
Some facts in Numbers
3
JCR Journals
2
International Conferences
2
National Conferences
1
PhD Thesis
Regarding the first objective, the research team studied the generic control systems embedded in FPGA. The result of these previous investigations has been published in [1] in Review format. This previous investigation allowed to define not only the type of device necessary for the following investigations to be developed, but also to better define the strategy to be followed next. As a result of these initial studies, a reconfigurable open architecture strategy was chosen, capable of operating independently of the robot or camera used for visual control guidance.
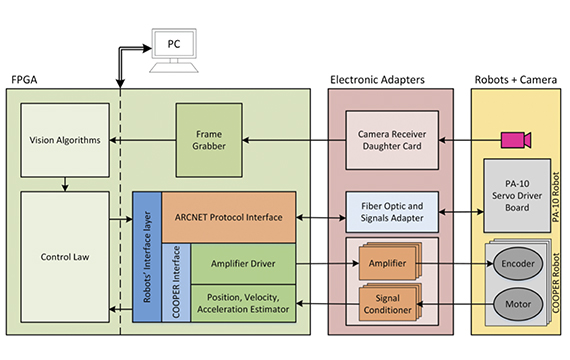
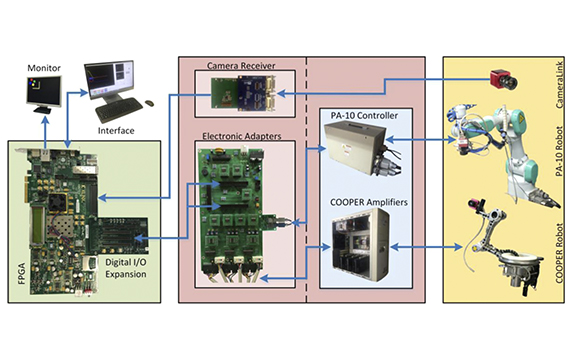
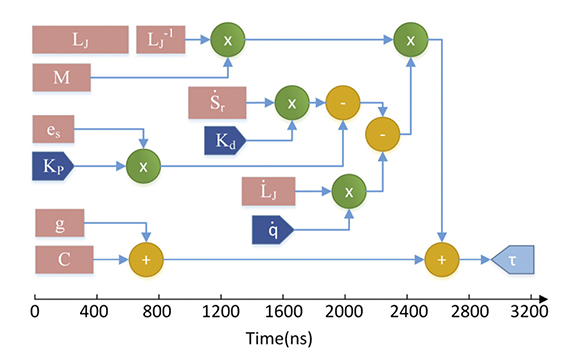
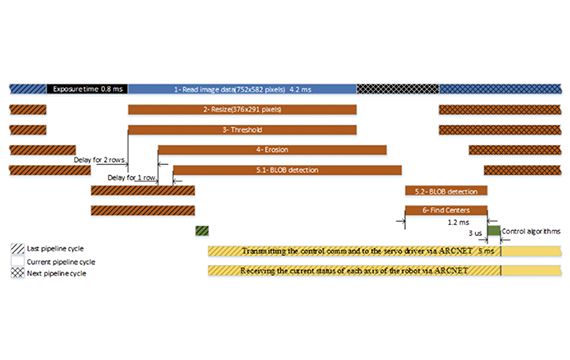
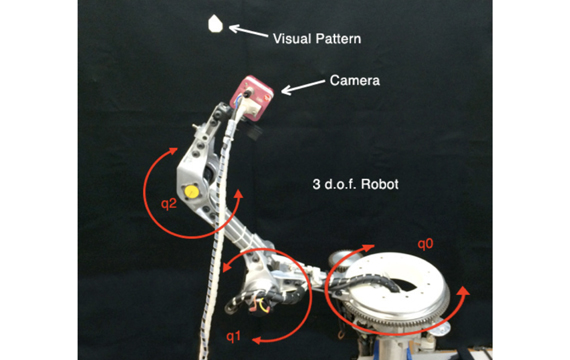
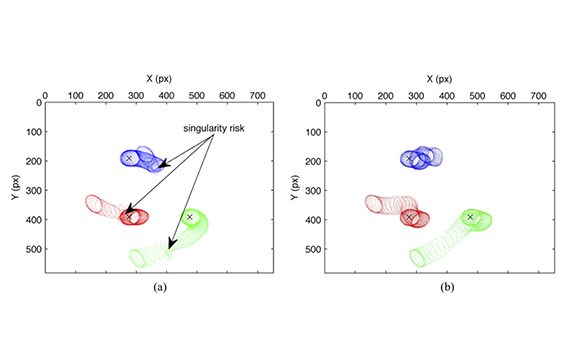
The main objective of the project was to develop a direct visual control scheme over FPGA. The developed controller is the first in the literature capable of performing on a FPGA the direct visual control of a manipulator robot. The project has worked with a camera with a Camera-Link interface. However, the design proposed in this project allows to include other types of cameras simply by developing the corresponding module, so that the algorithm for extracting visual characteristics becomes independent of the device. Next to the vision module, the control module has been worked on. This module also acts as a black box, so that, defined its inputs and outputs, it is possible to make the controller of the manipulator robot that is to be controlled independent. The reconfigurable architecture has been published in [2]. From this architecture it is easy to modify the controller and thus expand its capabilities to position the robot. Thus, in [3] a modification of the controller has been published on the same reconfigurable architecture, where the concept of dynamic perceptibility is used.
A Survey on FPGA-Based Sensor Systems: Towards Intelligent and Reconfigurable Low-Power Sensors for Computer Vision, Control and Signal Processing
Human Robotics Group - University of Alicante
Design and Control
of Robots
Advanced mechanical design of robotic devices and kinematic - dynamic control performance
Contact us
-
Human Robotics
UA Polytechnic School 3
Physics, Systems Engineering and Signal Theory Department
University of Alicante
Ctra San Vicente del Raspeig s/n
San vicente del Raspeig
03690 Alicante, Spain. -
(+34) 965 903 400 Ext. 1094
-
huro@ua.es
-
Week Days : 09:00 – 18:00
Saturday, Sunday : Holiday