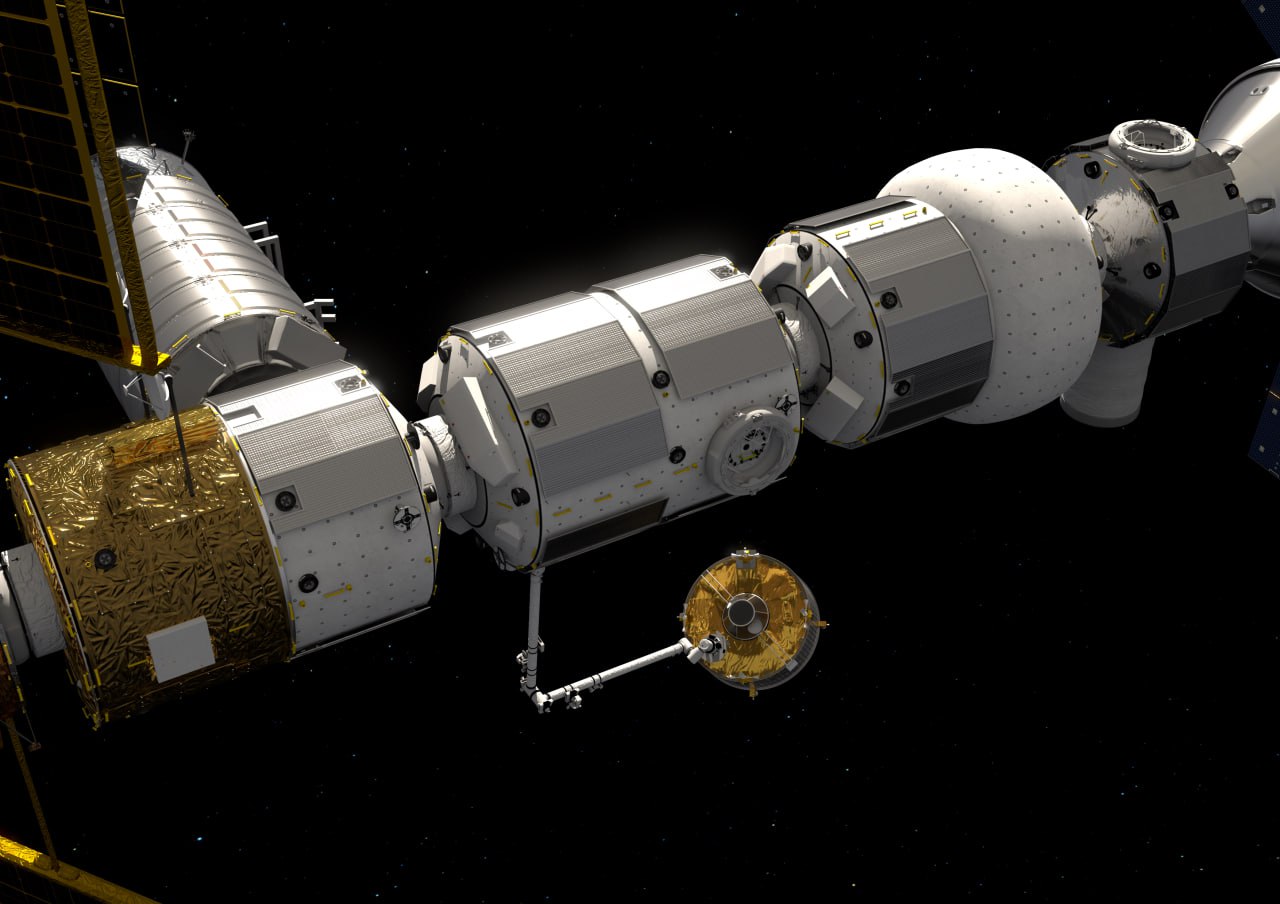

The development and testing of robotic systems for space often necessitate an iterative approach that, together with the technical difficulties of reproducing space conditions in ground-based test facilities and the high costs associated with these tests, discourage the utilization of hardware-based approaches in the earlier stages of the design. Consequently, software-based simulations offer significant advantages in terms of cost, versatility, and the ability to rapidly model and test space robotic systems. In cases where specific on-orbit phenomena cannot be easily or fully reproduced in ground-based facilities, software simulations become essential. For instance, reproducing the coupling between relative orbit dynamics and gravity gradient effects, atmospheric drag interactions, and sun-radiation pressure effects is generally challenging using flat table-based facilities, or robotic systems. In such situations, simulations represent the only option to get a representative and quantitative idea of the overall behavior of the robotic systems in space conditions.
HR Space robotics section proposes new space robots’ simulation and digital twin for space-robotics simulations [1][2]. Within this topic we should mention the OnOrbitROS framework [3]. This framework is based on Robot Operating System (ROS) and includes and reproduces the principal environmental conditions that eventual space robots and manipulators could experience in an on-orbit servicing scenario.
Human Robotics Group - University of Alicante
Contact us
-
Human Robotics
UA Polytechnic School 3
Physics, Systems Engineering and Signal Theory Department
University of Alicante
Ctra San Vicente del Raspeig s/n
San vicente del Raspeig
03690 Alicante, Spain. -
(+34) 965 903 400 Ext. 1094
-
huro@ua.es
-
Week Days : 09:00 – 18:00
Saturday, Sunday : Holiday