
DEVELOPMENT AND MONITORING OF SAFE HUMAN-MACHINE INTERACTION SYSTEMS IN MEDICAL ROBOTICS TASKS
- Reference: GRE20-18-A
- Principal investigator: Vicente Morell
- Research Centers: University of Alicante
- Duration: October 1st, 2021 – September 30th, 2022
- Financial Entity: University of Alicante
- Funding: 8.579 €
The objectives of the project are the following:
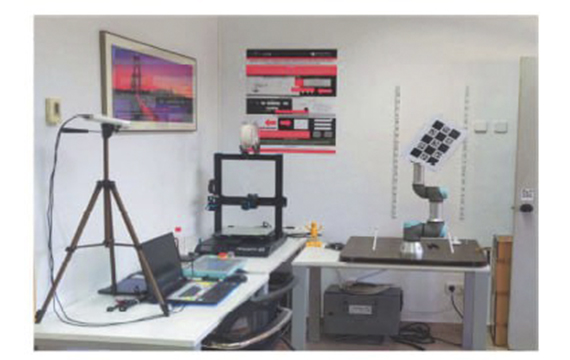
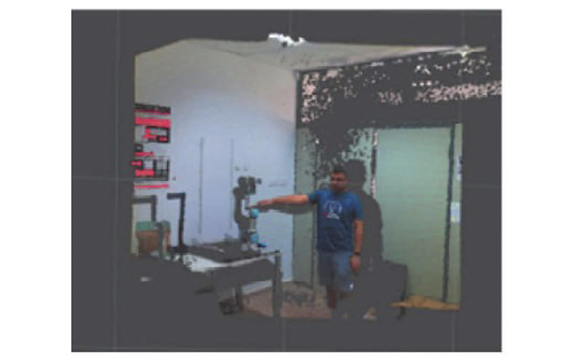
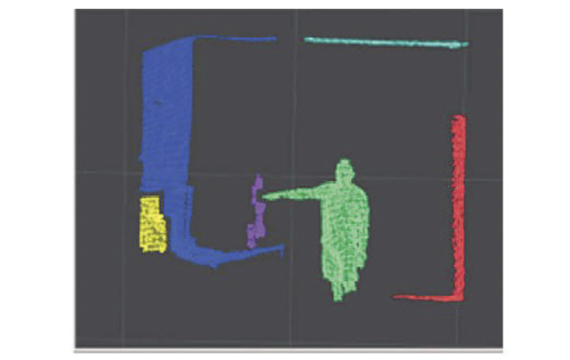
- To design and implementation of the monitoring system with 3D cameras.
- To evaluate methods for robust estimation of the pose of the users within the monitored room.
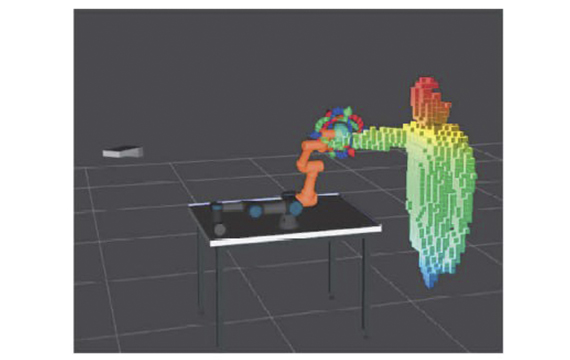
- To evaluate safety methods between robotic elements and users with special attention to rehabilitation tasks.
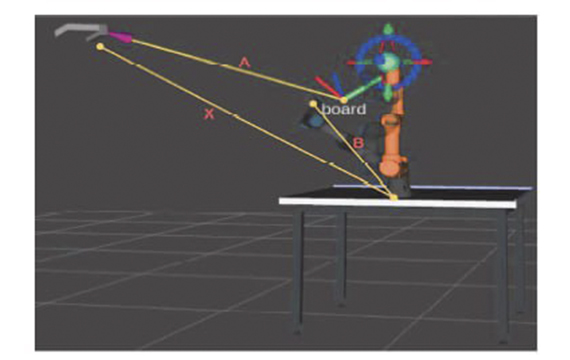
- To generate tools to assess the accuracy of external robotic systems.
Some facts in Numbers
2
JCR Journals
1
International Conferences
0
National Conferences
The main objective of the project is to create a physical and software tool that allows to objectively measure all those physical and spatial interactions of the robotic systems developed or used by the research group. On the hardware side, a monitored room will be designed and implemented using several 3D cameras and controlled lighting. The information from these cameras will be collected in a computer that will process the data from the cameras. The software part of this project contemplates the analysis of these images to provide the evaluation metrics of the interaction tasks between human and machine and to provide the necessary data for monitoring the security of these systems. Among the tasks necessary for this monitoring are the creation of occupancy maps, the estimation of a robust pose of the users, the application of Machine Learning / Deep Learning methods to create models that allow us to generate robust metrics, etc.
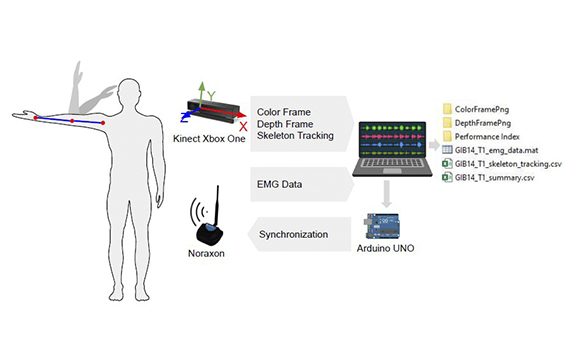
KIMHu: A Kinematic, Imaging and electroMyography dataset for Human muscular manipulability index prediction
Human Robotics Group - University of Alicante
Design and Control
of Robots
Advanced mechanical design of robotic devices and kinematic - dynamic control performance
Contact us
-
Human Robotics
UA Polytechnic School 3
Physics, Systems Engineering and Signal Theory Department
University of Alicante
Ctra San Vicente del Raspeig s/n
San vicente del Raspeig
03690 Alicante, Spain. -
(+34) 965 903 400 Ext. 1094
-
huro@ua.es
-
Week Days : 09:00 – 18:00
Saturday, Sunday : Holiday