Extravehicular activities represent one of the most dangerous and challenging activities currently performed on the International Space Station (ISS). Astronauts are periodically called to venture outside the ISS to perform maintenance and upgrade tasks. To accomplish such operations, astronauts require specific training sessions before the mission, utilize complex safety and life support equipment during the activities and work for several hours in an unfriendly environment, eventually subjected to space debris and space radiation.
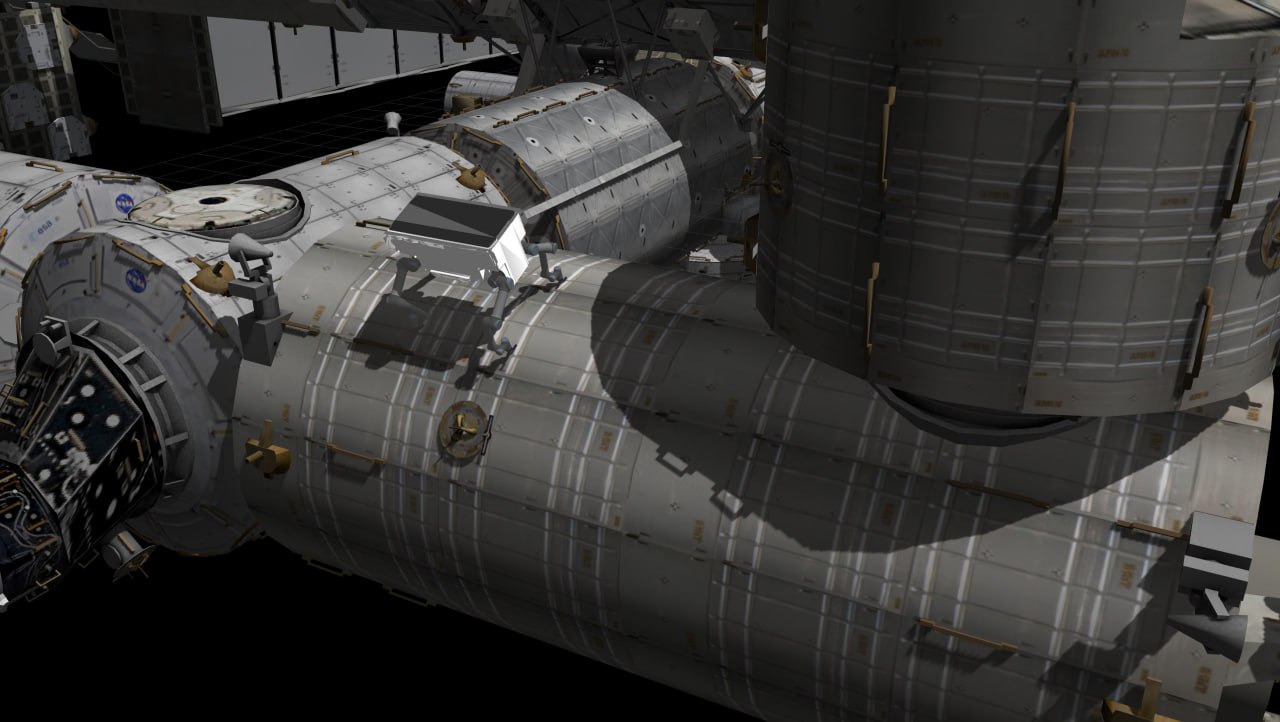
Future and under-development missions will require extensive use of on-orbit assembling and manufacturing to build, for example, new human exploration facilities, such as the Lunar Gateway and large commercial infrastructures, such as the Vast Satcom Antennas. The on-orbit assembling of such infrastructures will involve complex tasks with strict reliability, efficiency, and safety requirements. The utilization of astronauts performing some extravehicular activities is still considered a viable option, but it is challenged by the numerous technical and technological limitations. The utilization of autonomous robots is indeed a preferable option, especially for tasks where operations are repetitive, structured and standardized. On the other hand, it is also evident that robots will operate with tools and in environments strongly characterized by human presence: screwdrivers, brackets and pliers, as well as handles and handrails, are made to be easily used by human operators or astronauts. For this reason, humanoid robots and crawling robots appear to be preferable over other kinds of robotic systems in such kinds of scenarios. HR Space robotics section proposes new control approaches, optimization-based systems and AI based controllers for the guidance, navigation and control of on-orbit crawling and humanoid robots.
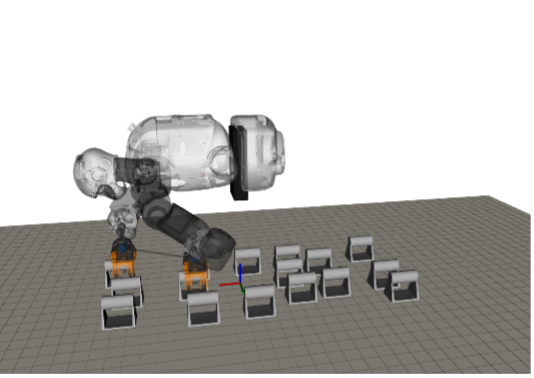
HR Space robotics section has proposed different approaches for the guidance, navigation and control of multipod on-orbit robots. Within these approaches we should mention the proposal of trajectory optimization methods applied to multipod robots and crawling robots [1][2], optimization algorithms for planning and control the motion of a humanoid robot during extravehicular activities [3][4], and visual servoing of complex on orbit robots [5]-[14].
On Orbit multi-legged robot control in extravehicular activities
Concurrent image-based visual servoing with adaptive zooming for non-cooperative rendezvous maneuvers
Human Robotics Group - University of Alicante
Contact us
-
Human Robotics
UA Polytechnic School 3
Physics, Systems Engineering and Signal Theory Department
University of Alicante
Ctra San Vicente del Raspeig s/n
San vicente del Raspeig
03690 Alicante, Spain. -
(+34) 965 903 400 Ext. 1094
-
huro@ua.es
-
Week Days : 09:00 – 18:00
Saturday, Sunday : Holiday